Antes de empezar con el tema electrico de la Makertrastos he echo un mini-tutorial sobre los motores paso a paso (Pap apartir de ya mismo) y asi poder entender un poco mejor todo.
Creo que lo primero seria saber que es un motor Pap.Entonces…
¿QUE ES UN MOTOR PAP?
Un motor Pap es un tipo de motor que se suele emplear en mecanismos que requieran precision y control en el angulo de giro. Son los tipicos motores que se emplean en impresoras , disqueteras,escaners… y tambien son los tipicos que de pequeño desmontaba de aparatos estropeados para usar en mis coches teledirigidos y que nunca hubo manera ni siquiera de hacerlos girar. ¿y por que no? . Pues por que a diferencia de un motor de corriente continua normal , al que solo hace falta conectar cada cable del motor a un polo de una pila y ya gira , estos requieren de un circuito de control externo para su funcionamiento al que llamamos driver. Dependiendo del tipo de motor Pap , necesitaremos un driver o otro. Entonces lo siguiente seria saber que tipo de motor tenemos entre manos.
TIPOS DE MOTORES PAP.
Otro de los motivos por los que nunca llegue a poder hacer girar un motor Pap fue que a diferencia de los de CC que solo tenian dos cables estos tenian 4 , 5 , 6 o hasta 8 cables!!!!!! ¿Estamos locos o que? ¿Para que tanto cable? ¿Es por si se rompe alguno? ¿Sera para dar colorido a esos circuitos tan feos?. Pues no , todo tiene su explicacion y es lo que tratare de explicar ahora.
Basicamente existen dos grandes grupos de Pap. Que serian los motores paso a paso unipolares y los bipolares.

Los motores Pap unipolares tienen cuatro bobinas y se llaman asi porque en cada bobina la corriente siempre circula en la misma direccion. Esto es una de las ventajas de los unipolares sobre los bipolares. Al no necesitar invertir la direccion de corriente , son mas faciles de manejar y mas baratos de fabricar los drivers. En el caso del dibujo de la izquierda tenemos uno de seis cables. Pero como podemos ver los dos centrales con comunes , entonces hay alguno que en

vez de tener dos comunes estos estan unidos internamente y tendriamos un unipolar de 5 hilos. La otra opcion es que tenga ocho. Con ocho tenemos varias opciones de conexion , si lo conectamos como en el dibujo de la izquierda tendriamos tambien un motor Unipolar.

El motor Pap bipolar tendria solo dos bobinas y a diferencia del unipolar , requiere de inversiones de corriente en sus bobinas para su manejo. Y para ello necesitariamos un puente H por cada bobina como veremos mas adelante. Esto hace que sean un poquito mas dificiles de usar y mas caros de fabricar sus drivers. Como ventaja , normalmente conseguiriamos mas torque. En el esquema de la izquierda tenemos un bipolar de cuatro hilos.
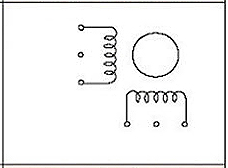
Normalmente los motores de seis hilos permiten conectarlos tanto como unipolares como bipolares. Dejando sin conectar los comunes como en el dibujo de la izquierda lo tendriamos en bipolar.
Las otras dos opciones que se me ocurren ahora es cuando tenemos 8 hilos. Con ocho hilos se pueden conectar en unipolar , en bipolar serie y en bipolar paralelo.

La diferencia entre conectarlo en serie o en paralelo seria que al conectar las bobinas en paralelo reducimos su resistencia y podemos aumentar la corriente que circula por ellas. Y con eso ganamos torque a velocidades mas altas , a costa de consumir mas , claro.
Ya ya , muy bonito todo…Pero como hacemos para mover un Pap??!!!! Ya va , ya va…
¿COMO MOVER UN MOTOR PAP?
Pues para mover un motor Pap , tenemos que enviar una serie de pulsos activando y desactivando sus bobinas en un orden adecuado. Eso orden va a depender de dos cosas , la primera si esta en unipolar o en bipolar y la segunda en si queremos que por cada pulso avance un paso , medio , o parte.
Vamos a ver primero como hacerlo con los motores unipolares. Que yo sepa hay tres tipos de secuencias para mover estos motores y vamos a empezar por la normal y mas recomendada.

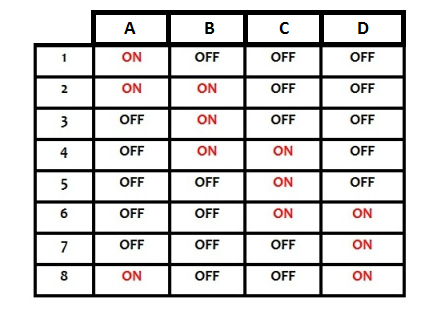
Como es un motor unipolar tenemos cuatro bobinas , que son A , B , C y D. Con este tipo de secuencia todo el rato tenemos activas dos bobinas y cada vez que activamos las dos siguientes hacemos avanzar el motor un paso. Tipicamente los motores son de 200 pasos por vuelta (aunque existen de muchos otros tipos) o sea que el motor giraria 1,8 grados. Haciendo toda la secuencia descrita en la tabla avanzariamos 4 pasos y para seguir avanzando pues simplemente volveriamos a repetir la secuencia las veces que nos hiciera falta. Y para girar al reves pues lo unico que tendriamos que hacer es seguirla en direccion contraria. La vetaja de esta secuencia es que como siempre tenemos dos bobinas activas es la que mas torque nos da.
La siguiente seria la secuencia wave drive.

En esta secuencia solo tenemos activa una bobina en cada paso del ciclo , esto hace que tengamos menor torque , pero a favor se supone que con ciertos tipos de motor ganamos en suavidad en los movimientos. En cada ciclo avanzariamos un paso esactamente igual que en la secuencia normal.
Y la ultima secuecia que tendriamos en unipolar seria la secuencia de medio paso.
Con este tipo de secuencia como su nombre indica lo que conseguimos es que en cada paso del ciclo avancemos medio paso en vez de uno entero. Eso quiere decir que para un tipico motor de 200 pasos por vuelta necesitariamos 400 pulsos para completar una vuelta y que avazariamos 0,9 grados por pulso. Con lo cual ganariamos en precision y en suavidad.

Este esquema que he encontrado por internet , seria un ejemplo sencillo de como conectar un motor unipolar usando el integrado ULN2803 , que no es mas que un integrado que contiene 8 transistores en configuracion Darlington. La limitacion de este integrado es que solo soporta hasta 500ma y por lo tanto no nos serviria para motores mas potentes. Para motores mas grandes habria que utilizar otro tipo de trasnsistores mas potentes como podrian ser mosfets.La secuencia de pulsos la podriamos generar mediante algun microcontrolador como podria ser arduino y directamente aplicarsela a las entradas del integrado.

Este esquema tambien sacado de internet mostraria la conexion mediante mosfets sin usar ningun integrado. Los diodos solo serian como proteccion de las cargas inductivas de las bobinas del motor. A1 , A2 , B1 y B3 recivirian la secuencia de pulsos desde el microcontrolador y los mosfets activarian las correspondientes bobinas. Otro dia ya hare un tutorial mas practico y se entendera mejor.
Y ahora vamos a ver cual seria la secuencia necesaria para manejar un motor bipolar. Recordemos que el motor bipolar tiene solo dos bobinas y cuatro hilos.
 Aqui hemos de tener en cuenta varias cosas. La primera es que A , B , C y D ya no se refiere a bobinas. Son cada uno de los cuatro cables. Las bobinas estarian formadas por AB y por CD.
Aqui hemos de tener en cuenta varias cosas. La primera es que A , B , C y D ya no se refiere a bobinas. Son cada uno de los cuatro cables. Las bobinas estarian formadas por AB y por CD.
La otra es que aqui ya no basta con ir activando y desactivando bobinas en un orden concreto. Aqui siempre estan las dos activas y lo que hacemos es ir invirtiendo la tension de las bobinas en la secuecia mostrada en la tabla. Esta es la razon por la cual los driver de los bipolares son algo mas complicados.
Para hacer esto necesitaremos un puente H por bobina. Es decir dos.

En el anterior esquema , que para variar tampoco es mio si no sacado de internet podemos ver como conectarioamos un motor bipolar mediante dos puentes H con mosfets. Las entradas A1 , A2 , B1 y B2 es donde enviariomos nuestra secuencia de pulsos desde arduino por ejemplo. Otra cosa que podemos apreciar es que necesitamos el doble de mosfets para controlarlo que en unipolar. Para motores menos potentes podriamos usar un integrado como podria ser el L298N , que no es mas que un integrado con dos puentes H en su interior.
Esto serian unos driver muuuuuy basicos , con los que lograriamos mover los motores , pero de una forma poco adecuada para muchas aplicaciones. Luego cuando hablemos de los driver veremos el porque digo esto. Pero primero vamos a ver cuales serian las caracteristicas que a mi me parecen mas importantes conocer de los Pap.
CARACTERISTICAS DE LOS MOTORES PAP.
PASOS POR VUELTA- Los pasos por vuelta como he explicado anteriormente son los pasos necesarios para completar una vuelta del eje. Normalmente son 200 , aunque hay de muchos otros tipos. En el caso de 200 pasos/vuelta si dividimos los 360º de una circunferencia por 200 nos da 1,8º por paso , si en vez de 200 fueran 8 por ejemplo tendriamos que por cada paso el eje giraria 45º.
HOLDING TORQUE o PAR MOTOR- Esta seria la fuerza del motor. Pero si no me equivoco la fuerza que se especifica en las caracteristicas es el par de detencion , es decir con el motor parado. El par disminuye conforme el motor aumente de velocidad. A mas velocidad menos par motor. Y esto hay que tenerlo muy encuenta porque si nos pasamos de velocidad o de aceleracion el motor perdera pasos y si no tenemos unos encoders o algo asi , ni el motor ni el microcontrolador tiene manera alguna de saber que se han perdido esos pasos perdiendo toda la precision caracteristicas de estos motores.
CORRIENTE POR FASE-Esta es la corriente que soporta cada bobina del motor. Y esta depende del motor y de si esta conectado en unipolar , bipolar serio o bipolar paralelo.
VOLTAJE- Esto nos indica el voltaje que soporta el motor. Si construyeramos los anteriores drivers tendriamos que tener en cueta este dato para no alimentar los motores a mas voltaje. Pero con unos buenos drivers que tengan control de corriente podemos aumentar esta en mucho y asi conseguir mas velocidad. Luego lo vemos mejor.
INERCIA- Aqui nos indica la inercia del rotor del pap , a menor inercia mas aceleracion y deceleracion le podremos dar al motor sin que pierda pasos.
Normalmente hay alguna caracteristica mas , pero ni las controlo del todo , ni lo he necesitado nunca.
DRIVERS.
Anteriormente ya hemos hablado un poco de los drivers mas basicos , pero como he dicho no son los mas adecuados para sacar todo el potencial de nuestros motores Pap. Un buen driver deberia tener control de corriente , esto nos ayuda en varias cosas. Por un lado ya no tenemos que fijarnos en el voltaje de un motor y podemos conectarlo a un voltaje muy superior limitado solo por lo que soporte nuestro driver. Estos es asi por que el control de corriente se encargara de entregar solo la corriente necesaria para que el motor no se queme. Nosotros lo unico que hemos de hacer es indicarle la corriente que soportan nuestros motores al driver. Normalmente mediante microswichs o mediante un potenciometro.
Pero mas voltaje ¿para que? Pues porque la velocidad maxima de un motor esta directamente relacionada con el voltaje. A mayor voltaje antes alcanzara la corriente necesaria y antes estara listo para dar un nuevo paso.
Otra razon por la que necesitamos el control de corriente es para poder hacer microstepping. No voy a entrar muy a fondo a explicar como funciona esto , pero digamos que en vez de aplicar pulsos al 100% de corriente , aplicamos diferentes porcentajes a las bobinas y lo que conseguimos es que en cada pulso ya no avanzamos un paso completo si no una parte de este. Normalmete 1/2,1/4,1/8,1/16…ect. Asi si tenemos un motor de 200 pasos/vuelta y lo configuramos en microsteppig a 1/4 necesitariamos 800 pulsos para dar una vuelta ganando precision y sobre todo suabidad en los giros.
Otra caracteristica que suelen tener los buenos drivers es el ENABLE. Los motores paso a paso tal y como los controlabamos antes , aunque esten parados siguen estando energizados ya que siempre tienen alguna bobina energizada. Esto a veces es bueno ya que mantiene firmemente la posicion del motor , pero cuando no es necesario es mejor que el motor este desenegizado ya que en estado de reposo es cuando mas consume y mas se calienta. Pues para esto sirve la entrada ENABLE , desde ahi activamos o desactivamos los motores.
En los drivers comerciales normalmente tenemos tres entradas que serian STEP , DIRECCION y ENABLE. Cada vez que el driver recive un pulso en la entrada STEP , el motor girara un paso o una fraccion de paso si tenemos el microstepping activado en la direccion indicada mediate la entrada DIRECCION siempre y cuando tengamos el motor activado mediante la entrada ENABLE.
Hacer un buen driver no es tan sencillo como hacer uno basico como los de antes , por esto y porque buscando por la red se pueden conseguir drivers muy economicos , creo que rara vez compensa construirnos nuestros propios drivers mas que con fines didacticos. A la hora de elegir un driver nos hemos de fijar en varias cosas. Lo primero seria elejir entre un driver bipolar o uno unipolar segun lo que necesitemos. Despues habriamos de saber si tiene control de corriente y si acepta microstepping. El voltaje maximo soportado por el driver y la corriente maxima que puede manejar son otras dos caracteristicas importantes.
Con esto lo voy a dejar por hoy. Otro dia se me animo ya hare otro post mas practico y controlaremos un motor pap mediante arduino.
Tengo que decir que no soy ningun experto en este tema , todo son cosas aprendidas trasteando por la red y puede ser que haya dicho alguna tonteria. Si alguien cree que algo no esta bien , estaria bien saberlo.
